
Convergence Acceleration For DiffusionDet:On PROPS Dataset
 Report
Report Code
CodeAbstract
DiffusionDet(Diffusion based detection) (Chen et al., 2022) is a new object detection model that learns the denoising process from ground truth boxes with gaussian noises to original gt boxes. The authors of DiffusionDet trained and tested their model on large dataset MS-COCO. To test and enhance DiffusionDet’s robustness, we trained this model on a much smaller PROPS dataset, as we observed that the convergence rate and detection accuracy were poor, we proposed a new heatmap detection head and introduced heatmap loss as a complement to the model’s intrinsic loss. The result shows that the optimized model converges much faster and outperforms the original DiffusionDet by 1.8 AP on PROPS dataset.
Background Introduction
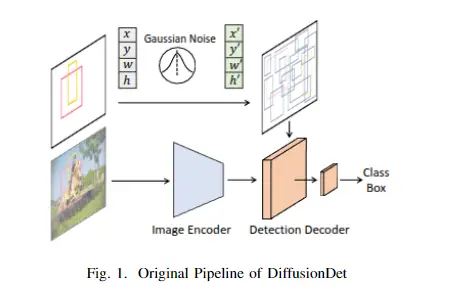
Traditional object detectors use fixed queries or predefined boxes refined via classification and regression. DiffusionDet, inspired by image denoising, introduces a “noise-to-box” approach: Gaussian noise is added to ground truth boxes during training, which are treated as ROIs on feature maps. An RNN-based decoder then learns to recover the original boxes. At inference, the model denoises random boxes to produce final detections, offering a novel method for object localization.
Heatmap Head
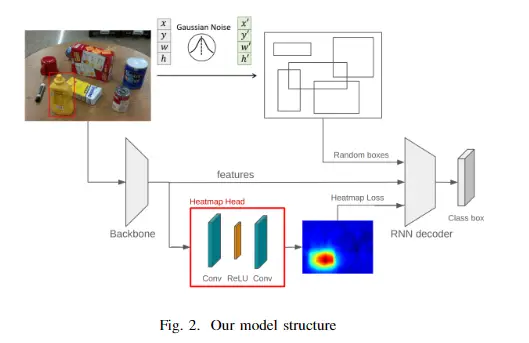
To enhance DiffusionDet’s convergence speed and improve detection performance on small or occluded objects, we propose a heatmap head as an auxiliary supervision module. The heatmap head consists of two convolution layers with a ReLU activation in between. It maps high-dimensional backbone features to class-specific heatmaps.
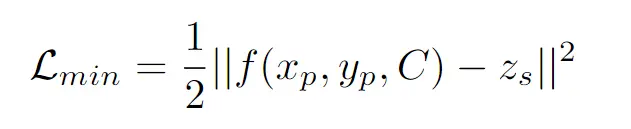
During training, we synthesize ground truth heatmaps using a 2D Gaussian kernel centered at each object’s location:

For each point (x , y) on the heatmap, we define a Gaussian response:

This loss is weighted and added to the total detection loss. The heatmap serves as a spatial attention signal, allowing the model to better localize small or occluded objects.
Results

This figure provides qualitative results on sample images from the PROPS dataset, highlighting the heatmap-enhanced model’s capability to accurately localize objects with high confidence, including challenging small and partially occluded targets. The optimized DiffusionDet model enhanced by the heatmap layer demonstrates precise localization and exception- ally high detection confidence across various object categories. Notably, the model achieved over 95% confidence scores for all detected instances, illustrating the robustness and accuracy of our proposed heatmap guidance.
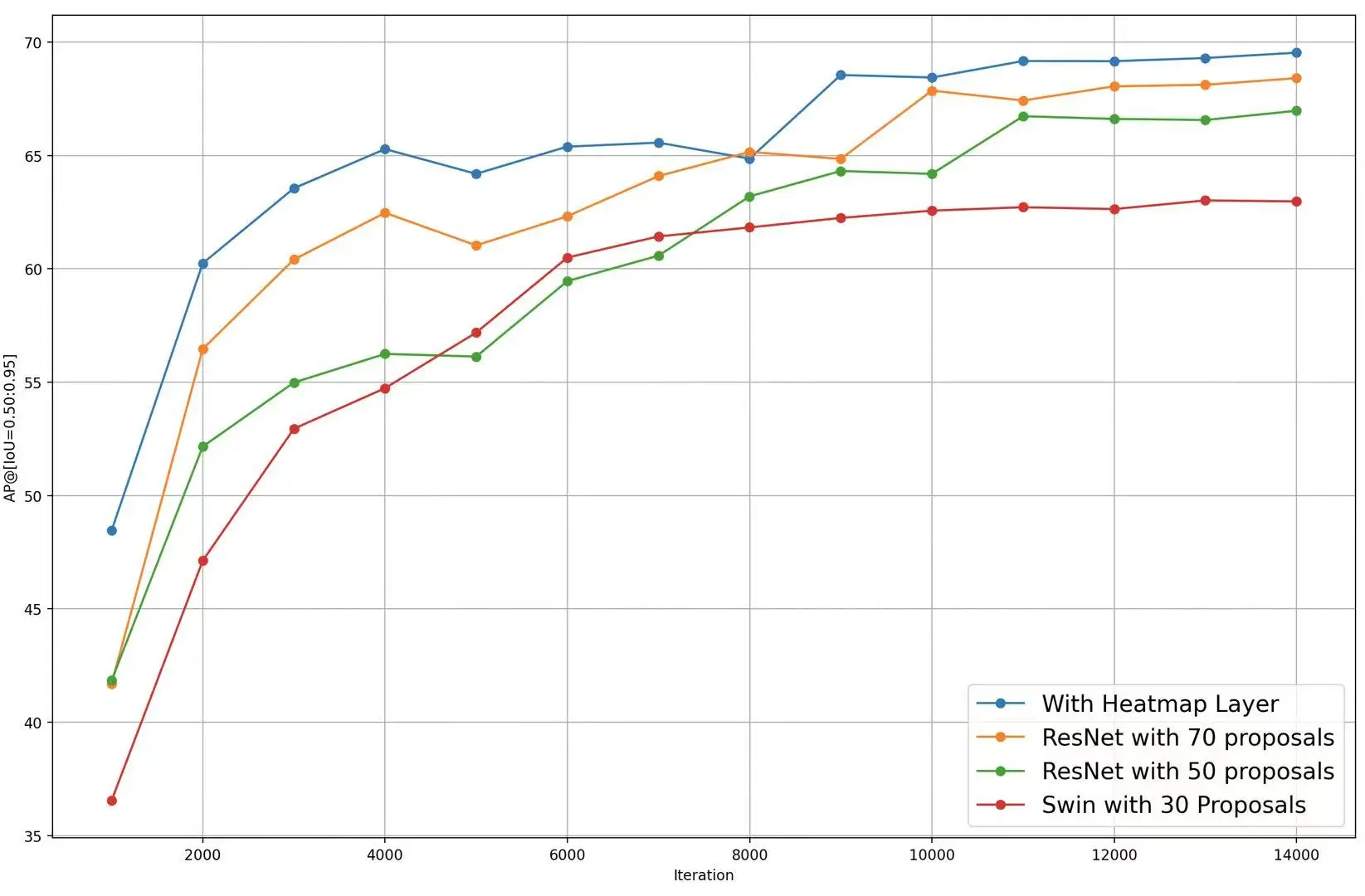
This figue compares the Average Precision (AP) over the course of training. The baseline using the Swin Transformer backbone with 30 proposals demonstrated a low initial convergence rate. Upon transitioning to the ResNet-50 backbone with an increased number of proposals, the AP improved considerably. Incorporating the heatmap head led to a substantial acceler- ation in convergence, especially evident in the early training stages, where AP sharply rose from approximately 38% to 58% within the first 1,000 iterations. After 15,000 iterations, the heatmap-enhanced model achieved a final AP around 67%, surpassing the baseline approaches by approximately 10%.
Contact
If you have any questions, feel free to contact Yang Lyu.