
Learning-Based Segmentation & Grasping on FETCH with PointNet++ & AnyGrasp
 Report
Report Code
CodeAbstract
We demonstrate a real-world grasping pipeline that uses RGB-D data from a Kinect sensor installed on the FETCH robot to grasp opaque and partially transparent objects. We use a preprocessing pipeline that combines planar surface extraction using RANSAC, clustering with DBSCAN, and Open3D-based NaN removal to address noise, missing depth, and environmental clutter. Target isolation and object segmentation are performed using a PointNet++ model trained on augmented YCB point clouds. AnyGrasp is used to produce grasp candidates, which are then assessed using MoveIt’s inverse kinematics and collision checking framework. We compare the system’s performance on rigid and transparent objects in both isolated and cluttered scenarios. Grasp success rate and collision rate are used as key metrics, with additional testing on colorless and colored transparent objects.
Introduction
Robotic grasping in unstructured environments remains a significant challenge due to perception uncertainty, object diversity, and planning constraints. In this project, we develop a real-world grasping pipeline for the FETCH mobile manipulator using RGB-D data from a Kinect sensor. The system integrates motion planning with MoveIt, grasp candidate generation with AnyGrasp, object segmentation with PointNet++, and point cloud preprocessing through Open3D filtering, RANSAC, and DBSCAN. The focus is on the implementation, deployment, and validation of the system on real hardware. Performance is evaluated on both rigid and transparent objects in isolated and cluttered settings, highlighting the strengths and limitations of the approach in practical robotic manipulation tasks.
Methods
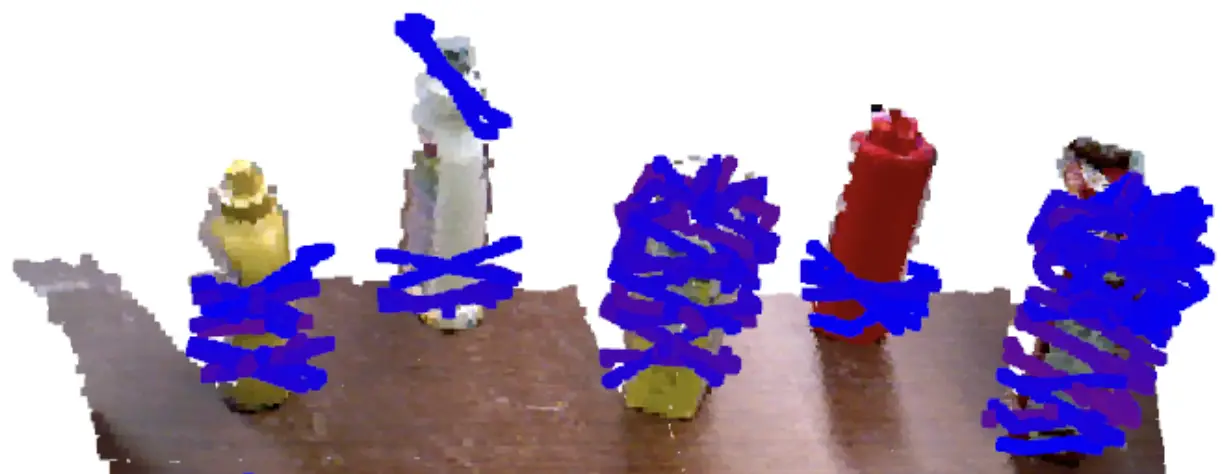
Robust Grasp Perception: AnyGrasp
AnyGrasp (Fang et al., 2022) provides dense and temporally consistent 7-DoF grasp pose predictions from partial point clouds. The system consists of a Geometry Processing Module, which samples and predicts stable grasp candidates using point-wise features, and a Temporal Association Module, which tracks grasps across frames for dynamic scenes using feature-based matching. Trained on real-world GraspNet-1Billion data with randomized point dropout, AnyGrasp achieves a 93.3% success rate in bin-picking tasks involving unseen objects.

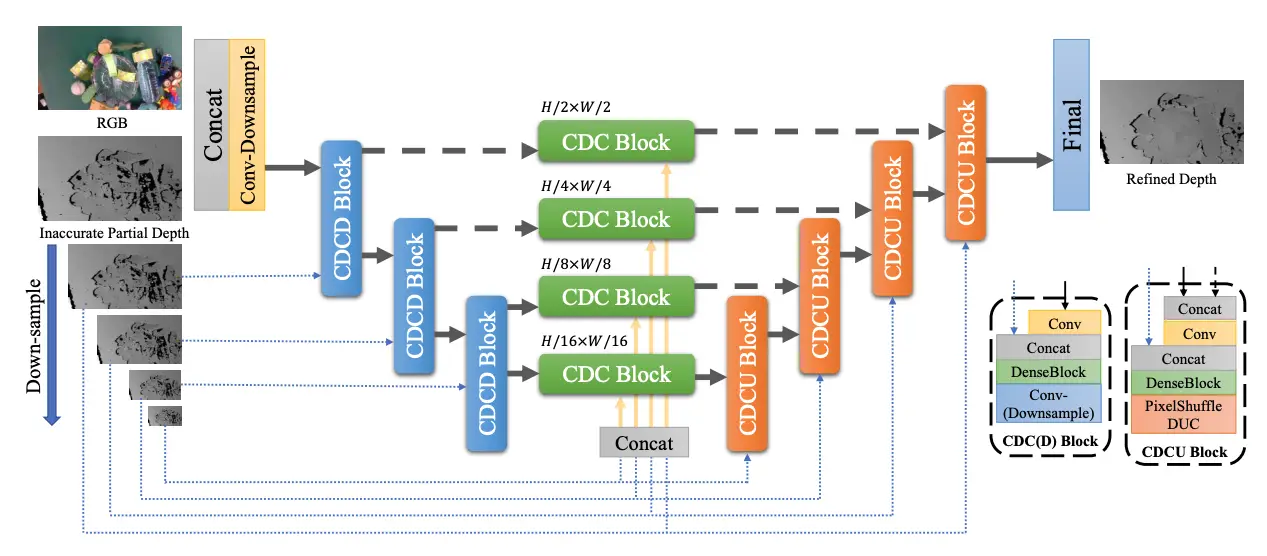
Transparent Object Depth Completion: TransCG
To address the challenge of incomplete depth perception for transparent objects, TransCG (Fang et al., 2022) introduces a real-world dataset and an efficient depth completion model, DFNet. DFNet refines noisy RGB-D inputs using dense blocks and a dual-loss strategy focusing on depth and surface normals. Trained on 57,715 images with augmentation, DFNet outperforms prior methods like ClearGrasp and demonstrates real-time performance, improving grasping reliability for transparent and translucent objects.
Results
Effect of Object Rigidity
Grasping performance differs notably between rigid and deformable objects. Rigid objects tend to yield higher success rates and lower collision rates, likely due to their stable structural properties that are better aligned with traditional robotic grasping strategies. In contrast, deformable objects introduce complexities such as unpredictable shape changes and instability during grasping, often resulting in increased accidental contacts and reduced reliability. These challenges highlight the limitations of current grasping systems, which historically have been tuned for rigid environments. Advancements in perception, modeling, and adaptive control will be essential to more effectively handle the nuances of deformable object manipulation moving forward.
Table I
| Object Type | Success Rate | Collision Rate |
|---|---|---|
| Rigid | 70% | 15% |
| Deformable | 67% | 27% |

Effect of Environment Clutter
Grasping performance varies significantly between isolated and cluttered environments. In isolated settings, success rates are notably higher, reflecting the reduced complexity and minimal interference from surrounding objects. In contrast, cluttered environments introduce challenges such as the need to navigate around neighboring objects, resulting in lower grasp success rates and the occurrence of collisions. The close proximity of multiple objects, combined with irregular surfaces—especially when deformable objects are involved—complicates grasp planning and reduces overall stability. These observations reinforce the necessity for more robust grasping strategies capable of dynamically adapting to cluttered and unstructured scenes, an essential consideration for advancing practical robotic manipulation systems.
Table II
| Scene Type | Success Rate | Collision Rate |
|---|---|---|
| Isolated | 75% | 0% |
| Cluttered | 70% | Clutter collisions |
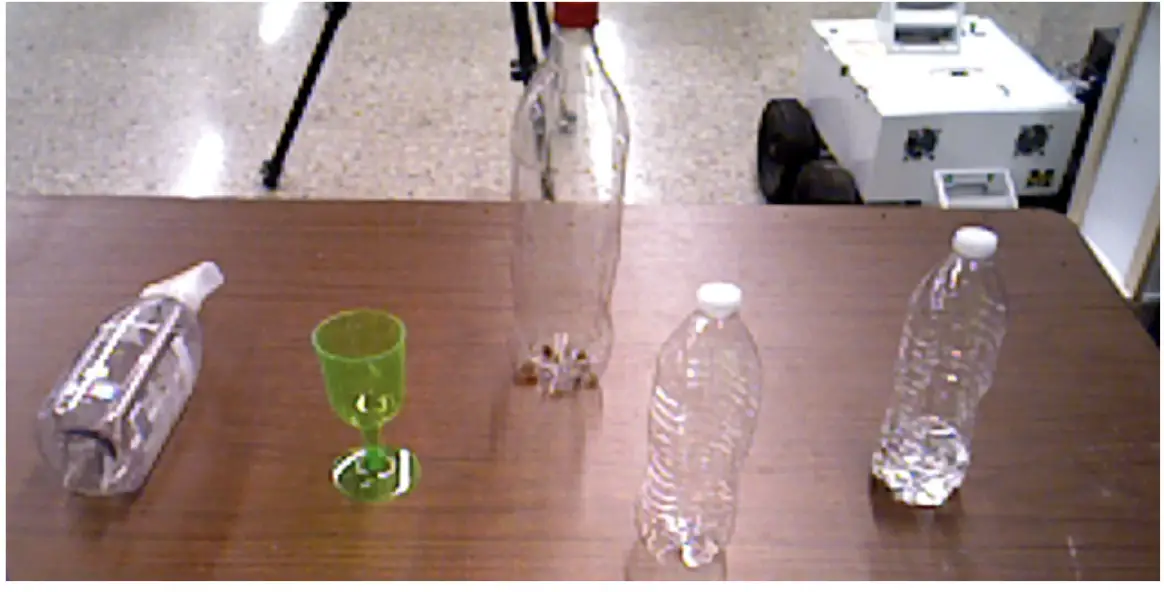
Effect of Object Transparency
Grasping transparent objects presents substantial challenges compared to opaque ones. Performance metrics reveal that success rates are considerably lower for transparent objects, primarily due to limitations in depth sensing and perception. Despite the application of depth completion techniques, incomplete or noisy depth data frequently undermines the stability of initial grasp attempts. Interestingly, while grasp failures were common, collision rates remained low, suggesting that the primary difficulty lies not in avoiding obstacles but in establishing reliable grasp points. These results emphasize a critical gap in current robotic perception systems and highlight the pressing need for more advanced methods tailored specifically to handling transparent materials in complex environments.
Table III
| Object Material | Success Rate | Collision Rate |
|---|---|---|
| Opaque | 70% | 15% |
| Transparent | 30% | 0% |


Project Video
We demonstrate a real-world robotic grasping pipeline using FETCH, combining RGB-D sensing, PointNet++-based segmentation, and AnyGrasp for 6-DoF grasp prediction. Our system handles both opaque and partially transparent objects in isolated and cluttered environments. Below, we showcase the project demo of our project.
Conclusion
In this project, we developed a modular robotic grasping system on the FETCH platform, capable of handling rigid, deformable, and transparent objects using RGB-D sensing, depth completion, PointNet++ segmentation, and AnyGrasp. While the system achieved strong performance on rigid and isolated objects, challenges remain in cluttered and transparent scenarios due to incomplete depth data and planning limitations. Future work will focus on enhancing transparent object perception, incorporating closed-loop feedback, and improving grasp planning to better approach human-level manipulation performance.
Citation
If you found our work helpful, consider citing us with the following BibTeX reference:
@article{marzuk-umich2025sdeeprob,
title = {Learning-Based Segmentation & Grasping on FETCH with PointNet++ & AnyGrasp},
author = {Marzuk Kalluparamban, Hemanth Murali, Maithreyan Ganesh, and Jyotishka Dutta Gupta},
affiliation = {University of Michigan},
year = {2025}
}
Be sure to update this reference to include your team’s author information for correct attribution!
Contact
If you have any questions, feel free to contact Marzuk Kalluparamban and Hemanth Murali.